Post-processing
In this section, we will look at how to access and visualize data from saved files. We will also look at warm/hot starting of an optimization using previously saved data.
Saving optimization data to a file
We saw earlier in Basic User Guide how to save optimization data.
Since our goal is to understand how we can use the saved files, we begin by
running our standard problem and saving it to a file named postprocessing.hdf5.
import numpy as np
def objective(x):
return x[0]**2 + x[1]**2
def gradient(x):
return np.array([2*x[0], 2*x[1]])
def constraints(x):
return np.array([x[0] + x[1] - 1, 3*x[0] + 2*x[1] - 1])
def jacobian(x):
return np.array([[1, 1], [3, 2]])
x_lower = np.array([0.4, -np.inf])
x_upper = np.array([np.inf, 0.6])
num_eqcon = 1
x0 = np.array([2,3])
from pyslsqp import optimize
results = optimize(x0, obj=objective, grad=gradient, con=constraints, jac=jacobian, meq=num_eqcon, xl=x_lower, xu=x_upper,
save_itr='all', save_vars=['x', 'objective', 'optimality', 'feasibility', 'step', 'mode', 'iter', 'majiter', 'ismajor', 'constraints', 'gradient', 'multipliers', 'jacobian'],
save_filename="postprocessing.hdf5")
Optimization terminated successfully (Exit mode 0)
Final objective value : 5.000000e-01
Final optimality : 1.232595e-31
Final feasibility : 0.000000e+00
Number of major iterations : 4
Number of function evaluations : 4
Number of derivative evaluations : 4
Average Derivative evaluation time : 0.000042 s per evaluation
Average Function evaluation time : 0.000043 s per evaluation
Total Function evaluation time : 0.000169 s [ 0.68%]
Total Derivative evaluation time : 0.000173 s [ 0.70%]
Optimizer time : 0.000115 s [ 0.46%]
Processing time : 0.024273 s [ 98.15%]
Visualization time : 0.000000 s [ 0.00%]
Total optimization time : 0.024730 s [100.00%]
Summary saved to : slsqp_summary.out
Iteration data saved to : postprocessing.hdf5
Viewing saved file contents
To view what data is available in a saved file, we call the print_file_contents() utility with the saved file name postprocessing.hdf5.
from pyslsqp.postprocessing import print_file_contents
print_file_contents('postprocessing.hdf5')
Available data in the file:
---------------------------
Attributes of optimization : ['acc', 'con_scaler', 'finite_diff_abs_step', 'finite_diff_rel_step', 'hot_start', 'iprint', 'keep_plot_open', 'load_filename', 'm', 'maxiter', 'meq', 'n', 'obj_scaler', 'save_figname', 'save_filename', 'save_itr', 'save_vars', 'summary_filename', 'visualize', 'visualize_vars', 'warm_start', 'x0', 'x_scaler', 'xl', 'xu']
Saved variable iterates : ['constraints', 'feasibility', 'gradient', 'ismajor', 'iter', 'jacobian', 'majiter', 'mode', 'multipliers', 'objective', 'optimality', 'step', 'x']
Results of Optimization : ['constraints', 'feasibility', 'fev_time', 'gev_time', 'gradient', 'jacobian', 'message', 'multipliers', 'nfev', 'ngev', 'num_majiter', 'objective', 'optimality', 'optimizer_time', 'processing_time', 'save_filename', 'status', 'success', 'summary_filename', 'total_time', 'visualization_time', 'x']
Loading results and attributes
In the previous code block, we saw that there are mainly three types of information available in a saved file: attributes, variable iterates, and results.
Attributes and results of optimization can be loaded as dictionaries by simply calling the load_attributes() and load_results() utility functions with the saved file name as shown below.
from pyslsqp.postprocessing import load_attributes, load_results, print_dict_as_table
attributes = load_attributes('postprocessing.hdf5')
results = load_results('postprocessing.hdf5')
print("Attributes:")
print_dict_as_table(attributes)
print("Results:")
print_dict_as_table(results)
Attributes:
--------------------------------------------------
acc : 1e-06
con_scaler : 1.0
finite_diff_abs_step : None (undefined)
finite_diff_rel_step : 1.4901161193847656e-08
hot_start : False
iprint : 1
keep_plot_open : False
load_filename : None (undefined)
m : 2
maxiter : 100
meq : 1
n : 2
obj_scaler : 1.0
save_figname : slsqp_plot.pdf
save_filename : postprocessing.hdf5
save_itr : all
save_vars : ['x', 'objective', 'optimality', 'feasibility', 'step', 'mode', 'iter', 'majiter', 'ismajor', 'constraints', 'gradient', 'multipliers', 'jacobian']
summary_filename : slsqp_summary.out
visualize : False
visualize_vars : ['objective', 'optimality', 'feasibility']
warm_start : False
x0 : [2 3]
x_scaler : 1.0
xl : [ 0.4 -inf]
xu : [inf 0.6]
--------------------------------------------------
Results:
--------------------------------------------------
constraints : [0. 1.5]
feasibility : 0.0
fev_time : 0.00016927719116210938
gev_time : 0.00017261505126953125
gradient : [1. 1.]
jacobian : [[1. 1.]
[3. 2.]]
message : Optimization terminated successfully
multipliers : [1. 0.]
nfev : 4
ngev : 4
num_majiter : 4
objective : 0.5
optimality : 1.232595164407831e-31
optimizer_time : 0.00011491775512695312
processing_time : 0.024273395538330078
save_filename : postprocessing.hdf5
status : 0
success : True
summary_filename : slsqp_summary.out
total_time : 0.024730205535888672
visualization_time : 0.0
x : [0.5 0.5]
--------------------------------------------------
Loading variable iterates
To load variable iterates from a saved file, we can use the load_variable() utility function from pyslsqp.postprocessing.
This function needs two arguments.
The first argument is the file name and the second argument is the list of variable names to load.
The function returns a dictionary with keys as variable names and values as the list of variable iterates corresponding to a variable name.
from pyslsqp.postprocessing import load_variables
vars = load_variables('postprocessing.hdf5', ['x', 'objective', 'optimality', 'feasibility', 'step', 'mode', 'iter', 'majiter', 'ismajor', 'constraints', 'gradient', 'multipliers', 'jacobian'])
print_dict_as_table(vars)
--------------------------------------------------
x : [array([2. , 0.6]), array([0.4, 0.6]), array([0.4, 0.6]), array([0.53333333, 0.46666667]), array([0.53333333, 0.46666667]), array([0.5, 0.5]), array([0.5, 0.5]), array([0.5, 0.5])]
objective : [4.36, 0.5200000000000002, 0.5200000000000002, 0.5022222222222221, 0.5022222222222221, 0.5, 0.5, 0.5]
optimality : [99.0, 3.8399999999999985, 0.0, 7.697546304067748e-16, 0.0, 1.5173048003210468e-16, 0.0, 1.232595164407831e-31]
feasibility : [99.0, 4.440892098500626e-16, 4.440892098500626e-16, 1.1102230246251565e-16, 1.1102230246251565e-16, 0.0, 0.0, 0.0]
step : [99.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0]
mode : [0, 1, -1, 1, -1, 1, -1, 0]
iter : [0, 1, 2, 3, 4, 5, 6, 7]
majiter : [0, 1, 1, 2, 2, 3, 3, 4]
ismajor : [True, True, False, True, False, True, False, True]
constraints : [array([1.6, 6.2]), array([4.4408921e-16, 1.4000000e+00]), array([4.4408921e-16, 1.4000000e+00]), array([-1.11022302e-16, 1.53333333e+00]), array([-1.11022302e-16, 1.53333333e+00]), array([0. , 1.5]), array([0. , 1.5]), array([0. , 1.5])]
gradient : [array([4. , 1.2]), array([4. , 1.2]), array([0.8, 1.2]), array([0.8, 1.2]), array([1.06666667, 0.93333333]), array([1.06666667, 0.93333333]), array([1., 1.]), array([1., 1.])]
multipliers : [array([0., 0.]), array([2.4, 0. ]), array([2.4, 0. ]), array([1.06666667, 0. ]), array([1.06666667, 0. ]), array([1., 0.]), array([1., 0.]), array([1., 0.])]
jacobian : [array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]]), array([[1., 1.],
[3., 2.]])]
--------------------------------------------------
Users have the option to specify itr_start and itr_end, which will load all variable iterates between and including these two points.
By default, itr_start is set to 0 and itr_end to -1.
If the saved file contains all iterations of the optimization algorithm, but the user only needs the variables from major iterations between itr_start and itr_end,
they can set major_only=True in the function call.
In the following code, we only load the major iterations 1 ,2, and 3.
The variables we load are the major iteration and optimization iteration number,
the ismajor indicator, \(x_1\), the objective, optimality, feasibililty, and the constraint derivative \(\frac{\partial c_1}{\partial x_1}(x)\).
vars = load_variables('postprocessing.hdf5', ['majiter', 'iter', 'ismajor', 'x[0]', 'objective', 'optimality', 'feasibility', 'jacobian[0,0]'], itr_start=1, itr_end=3, major_only=True)
print_dict_as_table(vars)
--------------------------------------------------
majiter : [1, 2, 3]
iter : [1, 3, 5]
ismajor : [True, True, True]
x[0] : [0.40000000000000036, 0.5333333333333333, 0.5000000000000002]
objective : [0.5200000000000002, 0.5022222222222221, 0.5]
optimality : [3.8399999999999985, 7.697546304067748e-16, 1.5173048003210468e-16]
feasibility : [4.440892098500626e-16, 1.1102230246251565e-16, 0.0]
jacobian[0,0] : [1.0, 1.0, 1.0]
--------------------------------------------------
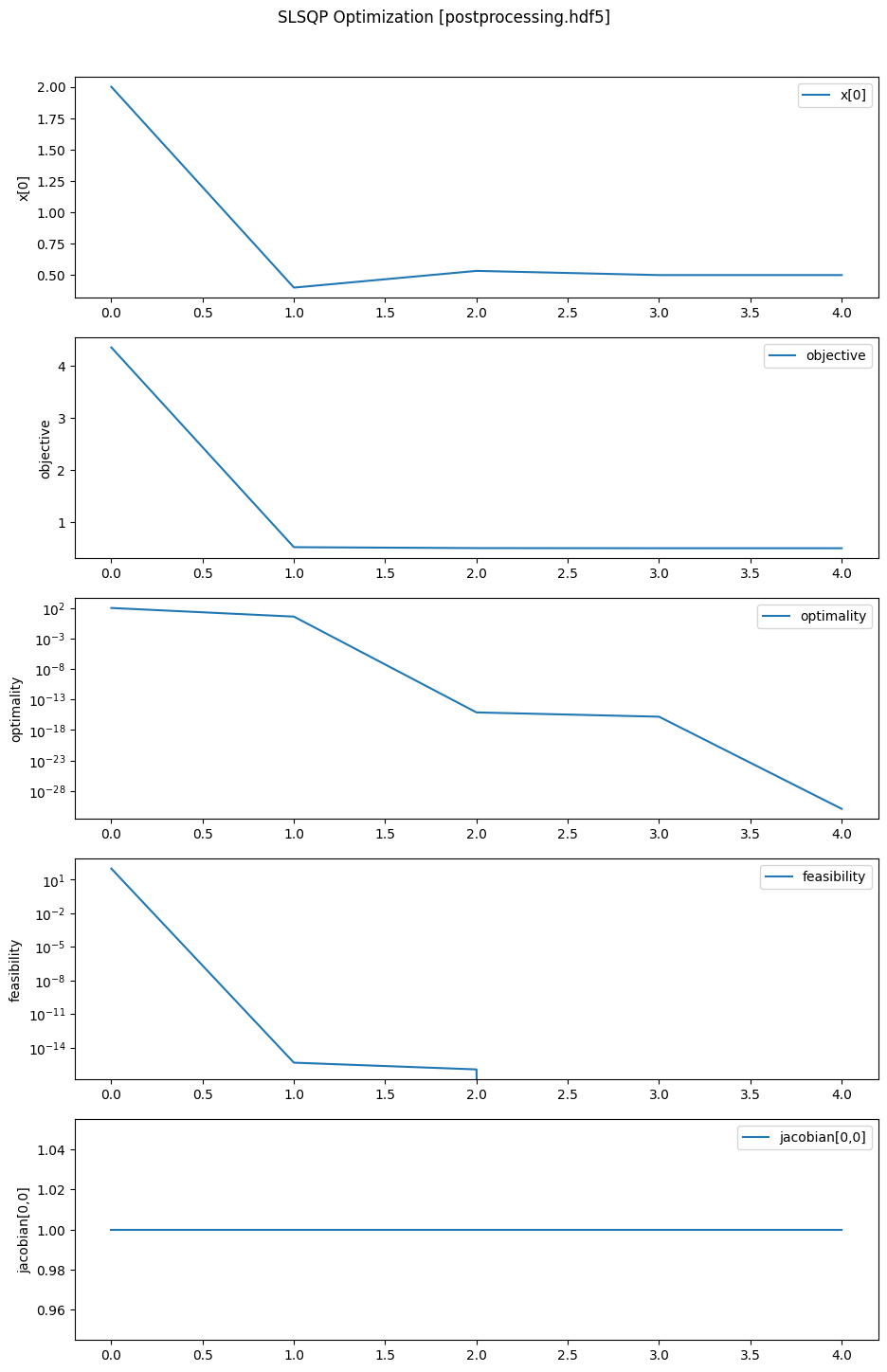
Visualizing saved optimization
To visualize a saved optimization, we use the visualize() utility from pyslsqp.postprocessing.
The two required arguments are the saved file name and the list of variable names to visualize.
This function also optionally takes in keyword arguments itr_start, itr_end, and major_only,
with their meanings exactly the same as discussed above for the load_variables function.
The final optimization plot can be saved by setting the keyword argument
save_figname which is None by default.
In the following code, we plot all the major iterations for \(x_1\), objective, optimality, feasibility, and \(\frac{\partial c_1}{\partial x_1}(x)\).
%matplotlib inline
from pyslsqp.postprocessing import visualize
visualize('postprocessing.hdf5', ['x[0]', 'objective', 'optimality', 'feasibility', 'jacobian[0,0]'], itr_start=0, itr_end=-1, major_only=True, save_figname='postprocessing_plot.pdf')
Restarting optimization - Warm start and Hot start
In many situations, users may need to restart a previously run optimization.
For instance, if the user wants to SLSQP to converge to a solution with higher accuracy than before,
they would need to run optimize() again, this time with a smaller value for the accuracy parameter acc.
Additionally, they might need to increase the value of maxiter to ensure that
the optimization doesn’t stop prematurely due to reaching the iteration limit.
In PySLSQP, warm starting refers to the process of restarting a previously run optimization
using the most recent value of x from a saved file.
If warm_start=True is set, the initial guess x0 provided by the user is
replaced with the value of x from the results in the file specified by load_filename.
If for some reason the results data is not available in load_filename,
PySLSQP will use the value of x from the last available saved iteration as x0.
In the following example, we warm start the optimization from the postprocessing.hdf5 file saved before.
results = optimize(x0, obj=objective, grad=gradient, con=constraints, jac=jacobian, meq=num_eqcon, xl=x_lower, xu=x_upper,
warm_start=True, load_filename="postprocessing.hdf5")
Warm starting from previous optimization solution x from postprocessing.hdf5...
Optimization terminated successfully (Exit mode 0)
Final objective value : 5.000000e-01
Final optimality : 2.465190e-31
Final feasibility : 0.000000e+00
Number of major iterations : 1
Number of function evaluations : 1
Number of derivative evaluations : 1
Average Derivative evaluation time : 0.000050 s per evaluation
Average Function evaluation time : 0.000031 s per evaluation
Total Function evaluation time : 0.000050 s [ 1.73%]
Total Derivative evaluation time : 0.000031 s [ 1.08%]
Optimizer time : 0.000019 s [ 0.67%]
Processing time : 0.002776 s [ 96.52%]
Visualization time : 0.000000 s [ 0.00%]
Total optimization time : 0.002876 s [100.00%]
Summary saved to : slsqp_summary.out
We see above that the optimization converged in a single iteration since we started from an already converged solution.
In PySLSQP, hot starting refers to the process of restarting a previously run optimization
by reusing the function (objective and constraints) and derivative values available from a previously saved file.
This approach is particularly beneficial when the functions and/or their derivatives are costly to evaluate.
One advantage of hot starting over warm starting is that during a hot start,
the BFGS Hessians approximated by the SLSQP algorithm will follow the same path as
the previous optimization while also saving the cost of function and derivative evaluations.
In contrast, during a warm start, although the algorithm starts from the previous solution x, the Hessian
is initialized as the identity matrix, which might result in more iterations before the
algorithm can converge.
It is very important to note that hot starting in PySLSQP will only work if save_itr was set to "all"
and save_vars included all of "objective", "constraints", "gradient", and "jacobian" in the previous optimization run.
This is because a hot start requires function and derivative data from all iterations and not just major iterations.
To hot start a problem, set hot_start=True when calling optimize() and specify load_filename
to indicate where the saved data will be reused from.
The following code hot-starts our optimization from the previously saved file postprocessing.hdf5.
results = optimize(x0, obj=objective, grad=gradient, con=constraints, jac=jacobian, meq=num_eqcon, xl=x_lower, xu=x_upper,
hot_start=True, load_filename="postprocessing.hdf5")
Hot starting using saved x, objective, constraints, gradient, and jacobian from postprocessing.hdf5...
Hot start is complete at iteration 7. Starting normal function evaluations...
Optimization terminated successfully (Exit mode 0)
Final objective value : 5.000000e-01
Final optimality : 1.232595e-31
Final feasibility : 0.000000e+00
Number of major iterations : 4
Num fun evals (reused in hotstart) : 4 (4)
Num deriv evals (reused in hotstart) : 4 (4)
Average Derivative evaluation time : 0.000015 s per evaluation
Average Function evaluation time : 0.000008 s per evaluation
Total Function evaluation time : 0.000060 s [ 0.69%]
Total Derivative evaluation time : 0.000031 s [ 0.35%]
Optimizer time : 0.000096 s [ 1.09%]
Processing time : 0.008577 s [ 97.87%]
Visualization time : 0.000000 s [ 0.00%]
Total optimization time : 0.008764 s [100.00%]
Summary saved to : slsqp_summary.out
We can see from the console output above that all 4 of the function and derivative evaluations required by SLSQP were reused from the saved file, and were never really computed using the user-provided functions and derivatives.
For more details on any of the post-processing utilities, visit the API Reference page.